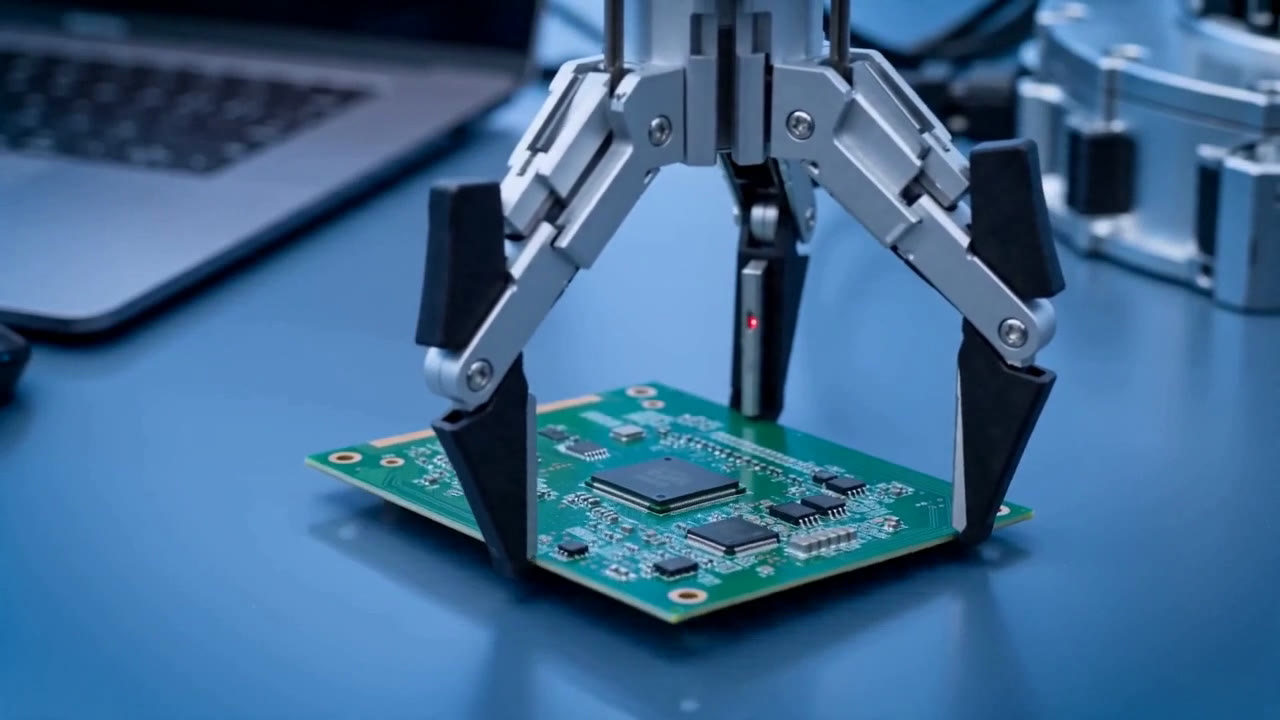
3D 拍照建模
相机一次成像,重建工件的三维点云与位姿 —— 不依赖模板、不靠人画特征点。
相机一次成像,重建工件的三维点云与位姿 —— 不依赖模板、不靠人画特征点。
世界模型理解空间、堆叠与遮挡关系,输出每个工件的可抓取位姿与优先级。
自动规划无碰撞路径,把抓取位姿映射到机械臂坐标系,感知-推理-执行闭环。
工件随意堆叠、互相遮挡也能逐个识别、规划抓取。
来料位置不固定也能精准对位,省去精密治具。
不靠 CAD 模板,反光、暗色、异形件同样稳。
±0.05mm 标定精度,抓得准、放得稳。
同一套视觉既做质检,又给机器人导航,复用底座。
对接 ABB / KUKA / FANUC / 国产机器人,SDK / API 接入。
为什么不一样 · WHY DAOAI
同行要么只做视觉、要么只做机械臂集成。我们从传感器、3D 成像到世界模型全栈自研 —— 质检与引导共用一个底座,越用越聪明。
1 亿+ 真实工业场景数据,持续打磨同一个空间理解模型。
八年驻厂、一条条产线沉淀出来的部署工程经验。
典型应用 · APPLICATIONS
螺栓、连接件、铸件等散堆零件直接抓取上线。
毛坯 / 成品自动装夹与转运,替代人工搬运。
视觉对位引导装配、打螺丝、插接与涂胶。
混合纸箱、托盘混码的识别与拆码垛。
小件、反光件、异形件的高精度抓取。
沿工件实际轮廓自适应规划加工轨迹。
| 对比维度 | 传统 2D 视觉 | 通用 3D 方案 | DaoAI 机器人视觉 |
|---|---|---|---|
| 来料要求 | 需固定位置 / 治具 | 有限堆叠 | 无序堆叠直接抓 |
| 建模方式 | 人工画 ROI / 模板 | 依赖 CAD 模板 | 点云 + 世界模型,无模板 |
| 反光 / 暗色件 | 易失效 | 适应性有限 | 多模态成像,稳定 |
| 数据安全 | — | 常需上云 | 100% 本地,数据不出厂 |
| 持续优化 | 固定算法 | 需厂商介入 | 从产线反馈持续学习 |